Project Overview
The technology and application of airborne laser altimetry or
Light Detection And Ranging, LiDAR, for mapping terrestrial topography has undergone a rapid evolution over the last few decades as these systems have transitioned from being research tools to operational systems that are commercially available in the private sector. The use of airborne lasers to measure bathymetry, however, has not experienced the same development. Bathymetric LiDARs, which employ a blue-green wavelength of laser light to penetrate water, currently remain a very specialized and unique technology with only a handful of these systems currently in existence, and their use almost exclusively relegated to coastal waters. The development of the NASA Experimental Airborne Research LiDAR,
EAARL, signifies a new generation in LiDAR technology, which
supplements recent advances in terrestrial LiDAR with water penetrating capabilities, thereby presenting exciting research opportunities for the application of this technology to complex environments such as those found in shallow rivers.
 |
 |
|
Fly over of LiDAR
data. (Click for
animation)
|
Fly
over of aerial
photograph
overlain on
LiDAR
data
(Click for animation)
|
Accomplishments
NASA initiated flights of its experimental EAARL LiDAR over targets along the Platte River, Nebraska during the week of March 25-29, 2002. USGS scientists selected two study reaches along the river for simultaneous detailed survey-grade GPS topographic mapping. The topographic points collected by wading the channel in these reaches serve as ground-truth points for the EAARL system, providing a means to evaluate system performance in response to a variety of subaerial, submerged and vegetated surfaces. Several thousand data points were collected by the USGS surveying team along transects perpendicular to the river channel and along longitudinal profiles. In addition to the study reaches, which were mapped with multiple flight lines ensuring a high density of points in these areas, EAARL flights extended over approximately 50 river miles of the 90-mile reach between Lexington and Chapman, NE. This reach has been designated by the USFWS as critical habitat for endangered whooping
cranes and least terns and
threatened piping plovers. The discharge in the Platte River prior to the EAARL flights was dominated by returns from the Johnson Hydropower plant or J-2. Emergency shutdown of the J-2 during this time period reduced flow in the river to approximately 500 cfs. This had the combined effect of exposing a large quantity of subaerial sandbars, and reducing the depths in most submerged areas to less than one half meter.
 |
 |
|
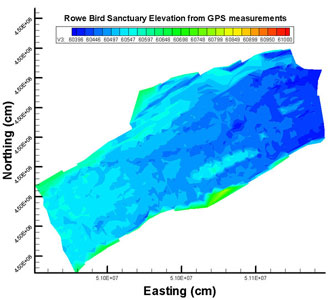
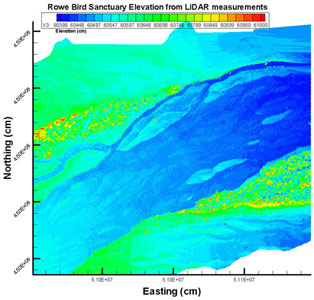
Comparison of
elevation
maps from
ground survey-grade
GPS and
aerial LiDAR
measurements. The GPS data
required three people
wading the
river over
two days, whereas the LiDAR
was
collected
over a few
seconds.
Note the
improved
resolution
of channel
features in
the LiDAR
map as
compared
with the map
created by a
TIN of the
ground GPS
data.
|
The data from both missions was transferred to USGS computers in May. Software capable of viewing and processing EAARL LIDAR return data was also provided. The current EAARL processing software represents a multi-year collaborative effort by NASA and USGS Coastal and Marine Geology. Therefore, initial processing algorithms have focused on primarily coastal applications (> 10 meter depths). Refinements of the algorithms occur when EAARL data is processed and evaluated against ground truth data. The Venture Capital funding has allowed the USGS WRD Rivers Group in Denver, CO and the NMD Mid-Continent Mapping Center in Rolla, MO, to enter into this iterative loop of algorithm development and verification for shallow (< 1 meter) depths. Processing of the EAARL data was delayed by further test flights required by NASA over the summer to refine the range bias and mounting bias of the instrument and computation of a precise trajectory for the Platte River missions.
Preliminary processing of the Platte River data is encouraging. The horizontal mapping accuracy of the EAARL system seems to be within 1 meter based on comparison between trees on orthophotos and overlain easily discernable EAARL surface targets of the same trees. Ranging measurements made by LiDAR are based on the time interval from the transmitted pulse to a point in the returned laser backscatter or waveform. While subaerial targets typically return backscatter that has one peak, backscatter from submerged targets in deep (generally greater than one half meter) water commonly return two peaks. Processing algorithms for these bathymetric waveforms take advantage of this two-peaked signature, specifically capitalizing on the strong second peak bottom return. In shallow water (generally less than one half meter) these two peaks can become convolved into a single waveform. Extracting ranging information from these convolved waveforms is the current focus of our research. The present iteration of Platte LiDAR processing involves processing all the waveforms from both subaerial and submerged targets using an algorithm written specifically for subaerial bare sand targets. This level of processing sought to first evaluate the vertical accuracy of the subaerial ranging measurements. Vertical ranging accuracy of subaerial targets was computed by evaluating the root mean square error or RMS for comparison LiDAR and ground truth points. For subaerial points the RMS error was 15 cm yielding a vertical accuracy of approximately 30 cm or 1 ft. Submerged points processed using the subaerial algorithm had an RMS error of 20 cm. Efforts are currently focused on manually recomputing the range for a subset of submerged waveforms for which the depth is known taking into account the speed of light in water.
Future work
Additional
testing of the EAARL system is planned
in 2005 using a
multi-spectral color
infrared camera that has
been recently added to the instrument package.
Images from this camera may provide a means to segregate subaerial and submerged waveforms so separate algorithms can be employed to process
waveforms from these surfaces. We also hope to obtain a higher discharge during the next evaluation, while this will give a larger range of depths for verification it also could potentially introduce significant suspended sediment and turbidity in the water column, which is thought to inhibit the use of bathymetric LiDAR in deep rivers. Monitoring the turbidity of the Platte during this second evaluation will help to quantify this potential limitation.
|


)
)