
Bathymetric LiDAR
Platte Subprojects
Project Overview
The technology and application of airborne laser altimetry or Light Detection And Ranging, LiDAR, for mapping terrestrial topography has undergone a rapid evolution over the last few decades as these systems have transitioned from being research tools to operational systems that are commercially available in the private sector. The use of airborne lasers to measure bathymetry, however, has not experienced the same development. Bathymetric LiDARs, which employ a blue-green wavelength of laser light to penetrate water, currently remain a very specialized and unique technology with only a handful of these systems currently in existence, and their use almost exclusively relegated to coastal waters. The development of the National Aeronautics and Space Administration (NASA) Experimental Advanced Airborne Research LiDAR, EAARL, signifies a new generation in LiDAR technology that supplements recent advances in terrestrial LiDAR with water penetrating capabilities, thereby presenting exciting research opportunities for the application of this technology to complex environments such as those found in clear and or shallow rivers.
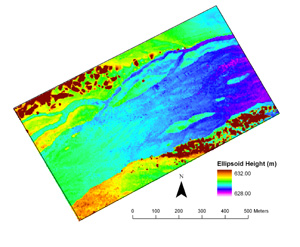
EAARL elevation surface of a reach of the Platte River passing though the National Audubon Society's Rowe Sanctuary, 3/2002.
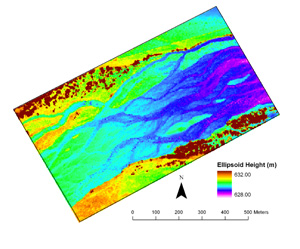
EAARL elevation surface of a reach of the Platte River passing though the National Audubon Society's Rowe Sanctuary, 6/2005.
Accomplishments
NASA initiated flights of its experimental EAARL LiDAR over targets along the Platte River, Nebraska during the week of March 25-29, 2002 (Kinzel and others, 2002). USGS scientists selected two study reaches along the river for simultaneous detailed survey-grade GPS topographic mapping. The topographic points collected by wading the channel in these reaches serve as ground-truth points for the EAARL system, providing a means to evaluate system performance in response to a variety of subaerial, submerged and vegetated surfaces. Several thousand data points were collected by the USGS surveying team along transects perpendicular to the river channel and along longitudinal profiles. In addition to the study reaches, which were mapped with multiple flight lines ensuring a high density of points in these areas, EAARL flights extended over approximately 50 river miles of the 90-mile reach between Lexington and Chapman, Neb. This reach has been designated by the U.S. Fish and Wildlife Service (USFWS) as critical habitat for endangered whooping cranes. It also is considered important habitat for endangered least terns and threatened piping plovers.
Software capable of viewing and processing EAARL LIDAR return data also was provided by NASA. The current EAARL processing software represents a collaborative effort by NASA and USGS Coastal and Marine Geology. Therefore, initial processing algorithms have focused on primarily coastal applications (> 10 meter depths). Refinements of the algorithms occur when EAARL data is processed and evaluated against ground-truth data. USGS Venture Capital funding awarded in 2002 has allowed the GSTL to enter into this iterative loop of algorithm development and verification for shallow (< 1 meter) depths.
Preliminary processing of the Platte River data is encouraging. The horizontal mapping accuracy of the EAARL system seems to be within 1 meter based on the basis of comparison between trees on orthophotos and overlain easily discernable EAARL surface targets of the same trees. Ranging measurements made by LiDAR are based on the time interval from the transmitted pulse to a point in the returned laser backscatter or waveform. While subaerial targets typically return backscatter that has one peak, backscatter from submerged targets in deep (generally greater than one half meter) water commonly return two peaks. Processing algorithms for these bathymetric waveforms takes advantage of this two-peaked signature, specifically capitalizing on the strong second peak bottom return. In shallow water (generally less than one-half meter) these two peaks can become convolved into a single waveform. Extracting ranging information from these convolved waveforms is the current focus of our research. The present iteration of Platte River LiDAR processing involves processing all the waveforms from both subaerial and submerged targets by using an algorithm written specifically for subaerial bare sand targets. This level of processing sought to first evaluate the vertical accuracy of the subaerial ranging measurements. Vertical ranging accuracy of subaerial targets was computed by evaluating the root mean square error or RMS for comparison LiDAR and ground-truth points. For subaerial points the RMS error was 15 cm. Submerged points processed by using the subaerial algorithm had an RMS error of 20 cm. Efforts are currently focused on manually recomputing the range for a subset of submerged waveforms for which the depth is known by taking into account the speed of light in water.
Further evaluation of the EAARL instrument was carried out in June of 2005. This evaluation was conducted during a higher streamflow, which provided a greater range of depths for ground-truth verification (Kinzel and others, 2006a) and also provided an opportunity to compare to the 2002 LiDAR dataset (See Above) (Kinzel and others 2006b).
For More Information
Kinzel, P.J., Legleiter, C.J., and Nelson, J.M., 2013, Mapping river bathymetry with a small footprint green LiDAR: Applications and Challenges. Journal of the American Water Resources Association,v. 49, p.183-204, DOI: 10.1111 ⁄ jawr.12008
Kinzel, P.J., and Wright C.W., 2002, Evaluation of EAARL, an experimental bathymetric and terrestrial LIDAR, for collecting river channel topography along the Platte River, Nebraska, Abstracts with Programs - Geological Society of America, in Geological Society of America, 2002 annual meeting. v. 34, no. 6, October 2002. p. 232.
Kinzel, P.J., Nelson, J.M. and Wright, C.W., 2006b Monitoring changes in the Platte River riparian corridor with serial LiDAR surveys: U.S. Geological Survey Fact Sheet 2006-3063, 4p.
Kinzel, P.J., Wright, C.W., and Nelson, J.M. 2006a, Application of an experimental airborne laser scanner for surveying a braided river channel, in Proceedings of the 8th Federal Interagency Sedimentation Conference, April 2-6, 2006, Reno, Nev: Subcommittee on Sedimentation, CD_ROM, 8 p.
Kinzel, P.J., Wright, C.W., Nelson, J.M. and A.R. Burman, 2007, Evaluation of an experimental LiDAR for surveying a shallow, braided, sand-bedded river, Journal of Hydraulic Engineering, 133(7), 838-842.